


Intel RealSense D430 的资料真少啊...
调用 IR 摄像头
import pyrealsense2 as rs
import numpy as np
import cv2
# We want the points object to be persistent so we can display the
# last cloud when a frame drops
points = rs.points()
# Create a pipeline
pipeline = rs.pipeline()
# Create a config and configure the pipeline to stream
config = rs.config()
config.enable_stream(rs.stream.infrared, 1, 1280, 720, rs.format.y8, 30)
# Start streaming
profile = pipeline.start(config)
# Streaming loop
try:
while True:
# Get frameset of color and depth
frames = pipeline.wait_for_frames()
ir1_frame = frames.get_infrared_frame(1) # Left IR Camera, it allows 1, 2 or no input
image = np.asanyarray(ir1_frame.get_data())
cv2.namedWindow('IR Example', cv2.WINDOW_AUTOSIZE)
cv2.imshow('IR Example', image)
key = cv2.waitKey(1)
# Press esc or 'q' to close the image window
if key & 0xFF == ord('q') or key == 27:
cv2.destroyAllWindows()
break
finally:
pipeline.stop()

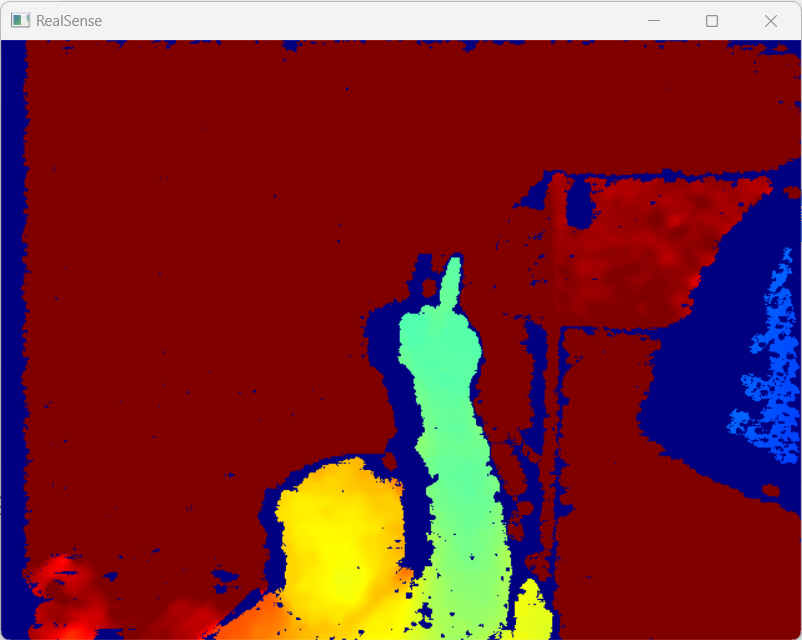
调用 Depth 摄像头
import pyrealsense2 as rs
import numpy as np
import cv2
import pcl
if __name__ == "__main__":
framerate = 90
# Configure depth and color streams
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, framerate)
# Start streaming
pipeline.start(config)
try:
while True:
# Wait for a coherent pair of frames: depth and color
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
# Convert images to numpy arrays
depth_image = np.asanyarray(depth_frame.get_data())
# Apply colormap on depth image (image must be converted to 8-bit per pixel first)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.2), cv2.COLORMAP_JET)
# Stack both images horizontally
# Show images
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', depth_colormap)
key = cv2.waitKey(1)
# Press esc or 'q' to close the image window
if key & 0xFF == ord('q') or key == 27:
cv2.destroyAllWindows()
break
finally:
# Stop streaming
pipeline.stop()
import pyrealsense2 as rs
import numpy as np
import cv2
import pcl
if __name__ == "__main__":
framerate = 90
# Configure depth and color streams
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, framerate)
# Start streaming
pipeline.start(config)
try:
while True:
# Wait for a coherent pair of frames: depth and color
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
# Convert images to numpy arrays
depth_image = np.asanyarray(depth_frame.get_data())
# Apply colormap on depth image (image must be converted to 8-bit per pixel first)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.2), cv2.COLORMAP_JET)
# Stack both images horizontally
# Show images
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', depth_colormap)
key = cv2.waitKey(1)
# Press esc or 'q' to close the image window
if key & 0xFF == ord('q') or key == 27:
cv2.destroyAllWindows()
break
finally:
# Stop streaming
pipeline.stop()
评论区